Yang Xu
Associate Professor, Tongji University Homepage(CN)

Brief bio
I am currently an associate professor (tenure-track) of Shanghai Reserach Institute for Intellogent Autonomous Systems(SRIAS), Tongji University, Shanghai. Prior to this, I worked as a postdoc supervised by Prof. Jiming Chen at Zhejiang University, Hangzhou, China. I received my D. Eng. degree from Zhejiang University at 2023, supervised by Prof. Meiqin Liu and Prof. Ronghao Zheng. From 2022 to 2023, I was a visiting scholar with the Robotics Institute, University of Technology Sydney (UTS) supervised by Prof. Shoudong Huang.
![]()
![]()
![]() I’m seeking highly self-motivated visiting/research assistant/M.S./PhD students for Spring/Fall 2027. For application, please send an email to me via xuyang_robot@tongji.edu.cn with the subject “[Position]+[Name]+[Affiliation]”~ Hope we can do some great and interesting things in robotics!
I’m seeking highly self-motivated visiting/research assistant/M.S./PhD students for Spring/Fall 2027. For application, please send an email to me via xuyang_robot@tongji.edu.cn with the subject “[Position]+[Name]+[Affiliation]”~ Hope we can do some great and interesting things in robotics!

Research interests
My research interests include active perception, life-long learning, and control in robotics. Welcome to reach out via email: xuyang_robot@tongji.edu.cn.
News
| May 15, 2026 | Our RA-L paper got the 2025 Honorable Mention of RA-L Best Paper Award (only 5/1700+)!!! |
|---|---|
| Feb 27, 2026 | Awarded the nomination of the CAAI Outstanding Doctoral Dissertation Award~ |
| Feb 8, 2026 | Join Tongji University as a tenure-track Associate Professor~ |
| Jan 8, 2026 | Serve again as the Associate Editor of IEEE RO-MAN 2026~ |
| Oct 3, 2025 | Invited to chair the session of Computer Vision for Transportation 2 (WeDT24), welcome to reach out at IROS 2025 Hangzhou! |
| Oct 2, 2025 | One paper accepted by T-Mech as regular paper! |
| Sep 18, 2025 | Appointed as Young Editorial Board Member of IET Cyber-Systems and Robotics (IET-CSR)! |
| Sep 4, 2025 | One paper accepted by IEEE IOT-J 2025, congrats to Jing Zeng ! |
| Aug 1, 2025 | Appointed as a member of the Young Editorial Board of BiRob (IF 5.4, Q1)! |
| Jun 30, 2025 | Appointed as the Associate Editor of SII 2026~ |
| Jun 16, 2025 | 2 paper accepted by IROS 2025, congrats to Wenhao and Bo Pang ! |
| May 12, 2025 | One paper accepted by MST 2025, congrats to Shaochen ! |
| Mar 25, 2025 | One paper accepted by RAL 2025, congrats to Jing Zeng ! |
| Mar 11, 2025 | Appointed as the Associate Editor (regular paper) of IEEE RO-MAN 2025~ |
| Mar 4, 2025 | One paper accepted by RAL 2025, congrats to Jin Li ! |
Academic services
Journal Editors: Biomimetic Intelligence and Robotics (BiRob), Young Editorial Board; IET Cyber-Systems and Robotics (IET-CSR), Young Editorial Board.
Conference Editors: ICRA, Associate Editor (2025, 2026); RO-MAN, Associate Editor (2024, 2025, 2026); SII 2026, Associate Editor.
Conference Services: ICRA 2024, Session Co-Chair; ICUS 2024/2025, PC Member/Invited Session Chair; IROS 2025, Session Chair
Journal Reviewer: IEEE T-NNLS/RA-L/T-ASE/T-II/T-CDS/T-ITS/T-IV/T-IM/Robotics and Autonomous Systems, IEEE/CAA Journal of Automatica SinicaS, IEEE Sensor Journal, Information Fusion, Measurement Science and Technology, et al.
Conference Reviewer: CVPR, ECCV, ICRA, IROS, AIM, ICONIP, et al.
Awards and honors
- Honorable Mention Winner of IEEE RA-L Best Paper Award (5/1700+), 2025
- National Postdoctoral Program for Innovative Talents (10 in automation nationwide), 2024
- Chinese National Scholarship for Ph.D. Students (2%), Oct. 2022
- Chinese Scholarship Council for Joint Ph.D. Students, Jul. 2022
- Academic Rising Stars of Ph.D. Students, Zhejiang University, Aug. 2022
Talks and presentations
-
2025-04-02: On-site talk at SRIAS of Tongji University. (Invited by Prof. Bin He)
-
ICRA 2024 (Yokohama, Japan) - CARE: Confidence-rich autonomous robot exploration using Bayesian kernel inference and optimization. Video
-
2024-04-27: Online talk & session chair at PRE-ICRA 2024. (Invited by CAA TC on Hybrid Intelligence)
-
2023-05-18: On-site talk at MiLab of Westlake University. (Invited by Prof. Donglin Wang)~
-
2022-10-15: Online talk at PRE-IROS 2022. (Invited by CAA TC on Hybrid Intelligence)
-
IROS 2022 (Kyoto, Japan) - Confidence-rich localization and mapping based on particle filter for robotic exploration. Video
-
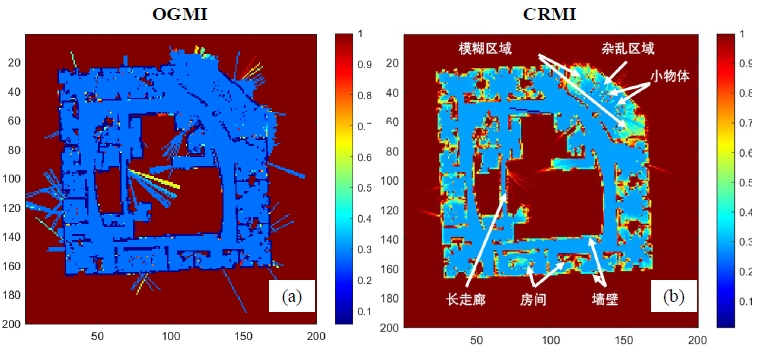
IROS 2021 (Prague, Czech) - CRMI: Confidence-rich mutual information for information-theoretic mapping, Video here: Youtube, Bilibili
Recent fundings and grants
- PI, Natural Science Foundation of China (NSFC), Youth Fund, 2025-2027
- PI, China Postdoctoral Innovation Talents Support Program, 2024 -2025
- PI, China Postdoctoral Science Foundation General Project, 2024 -2025
- Participant, National Key Research and Development Program of China, Key project, 2025-2028
- Participant, NSFC, Key International (Regional) Joint Research Program, 2026-2030
Selected publications
Find out my full publication list via Google Scholar.
* co-first author with equal contribution; # Corresponding author.