Yang Xu
Postdoc Research Fellow, ZJU Homepage(CN)

Brief bio
I am currently a Postdoc supervised by Prof. Jiming Chen at Zhejiang University, China. Prior to this, I received my D. Eng. degree from Zhejiang University at 2023, supervised by Prof. Meiqin Liu and Prof. Ronghao Zheng. From 2022 to 2023, I was also a visiting scholar with the Robotics Institute, University of Technology Sydney (UTS) supervised by Prof. Shoudong Huang.

Research interests
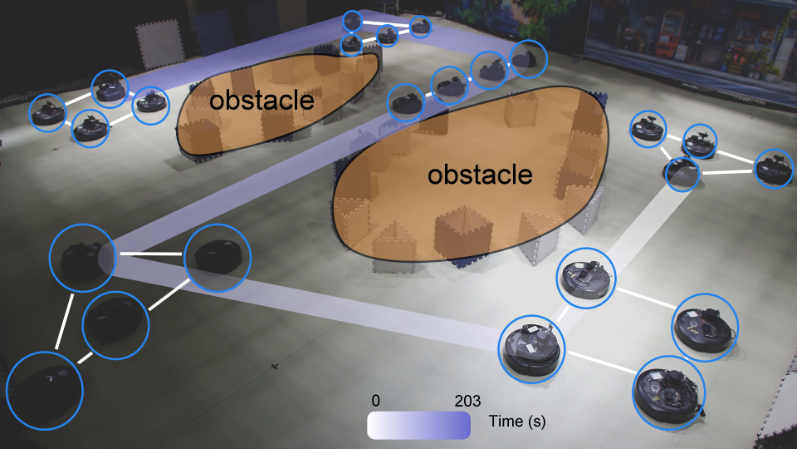
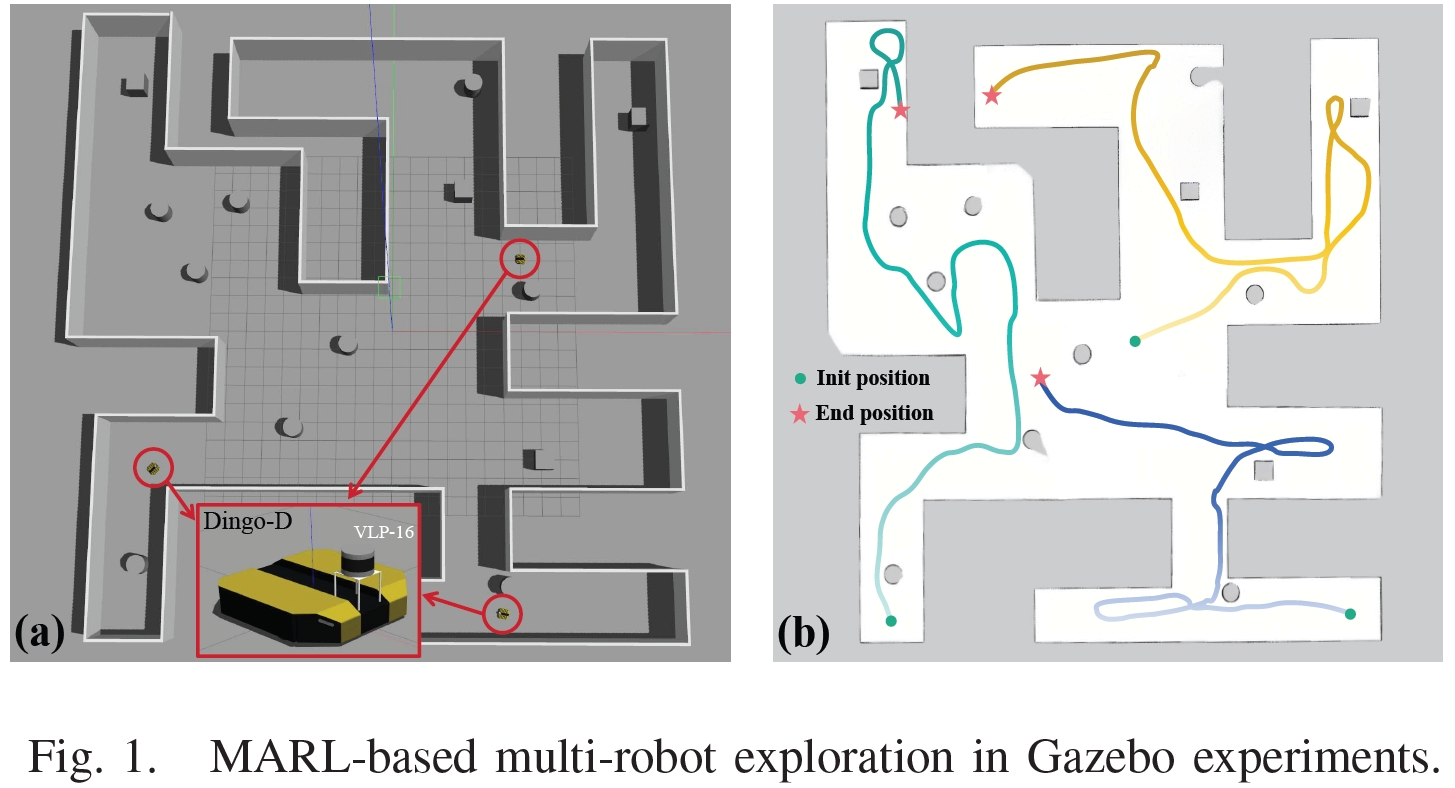
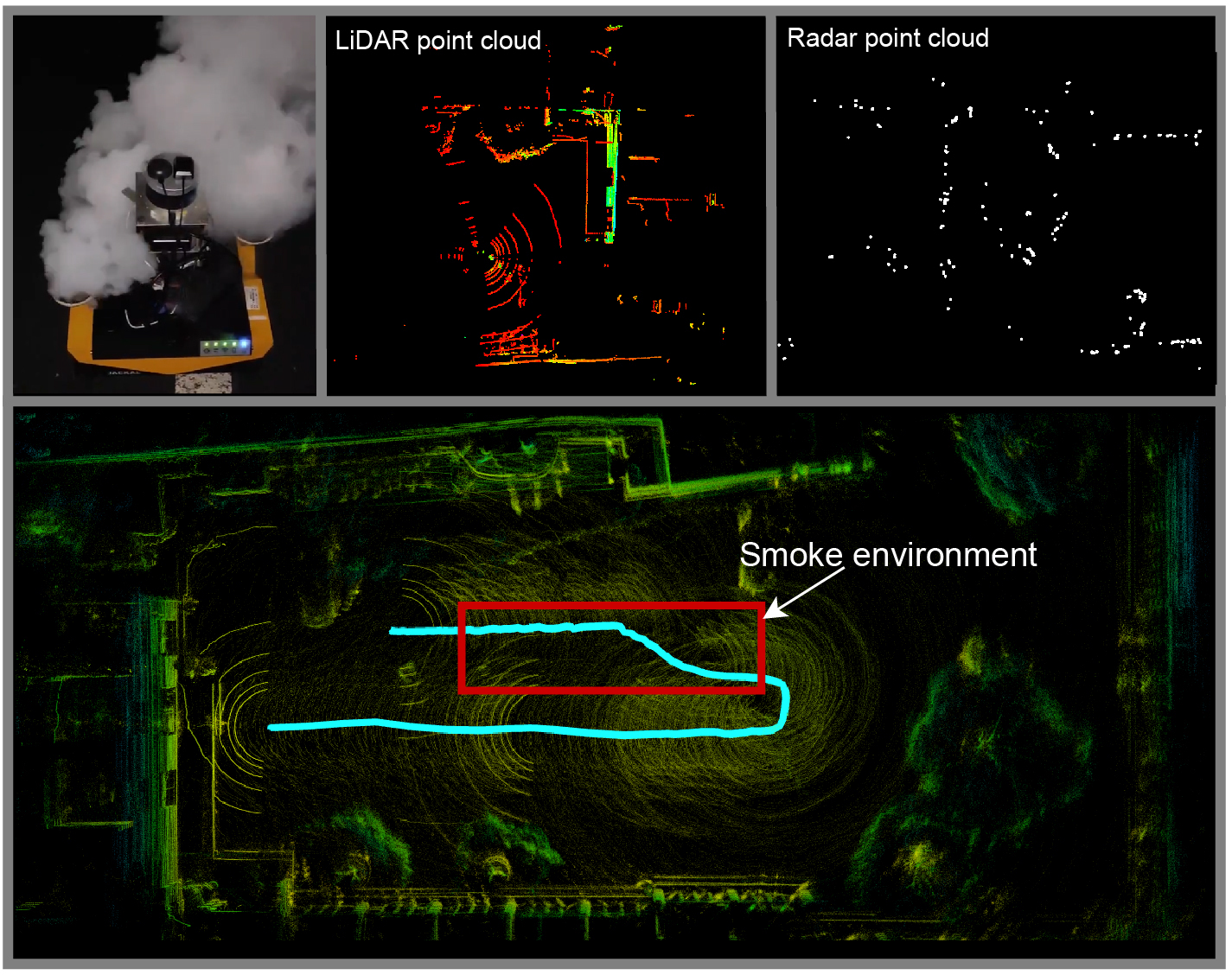
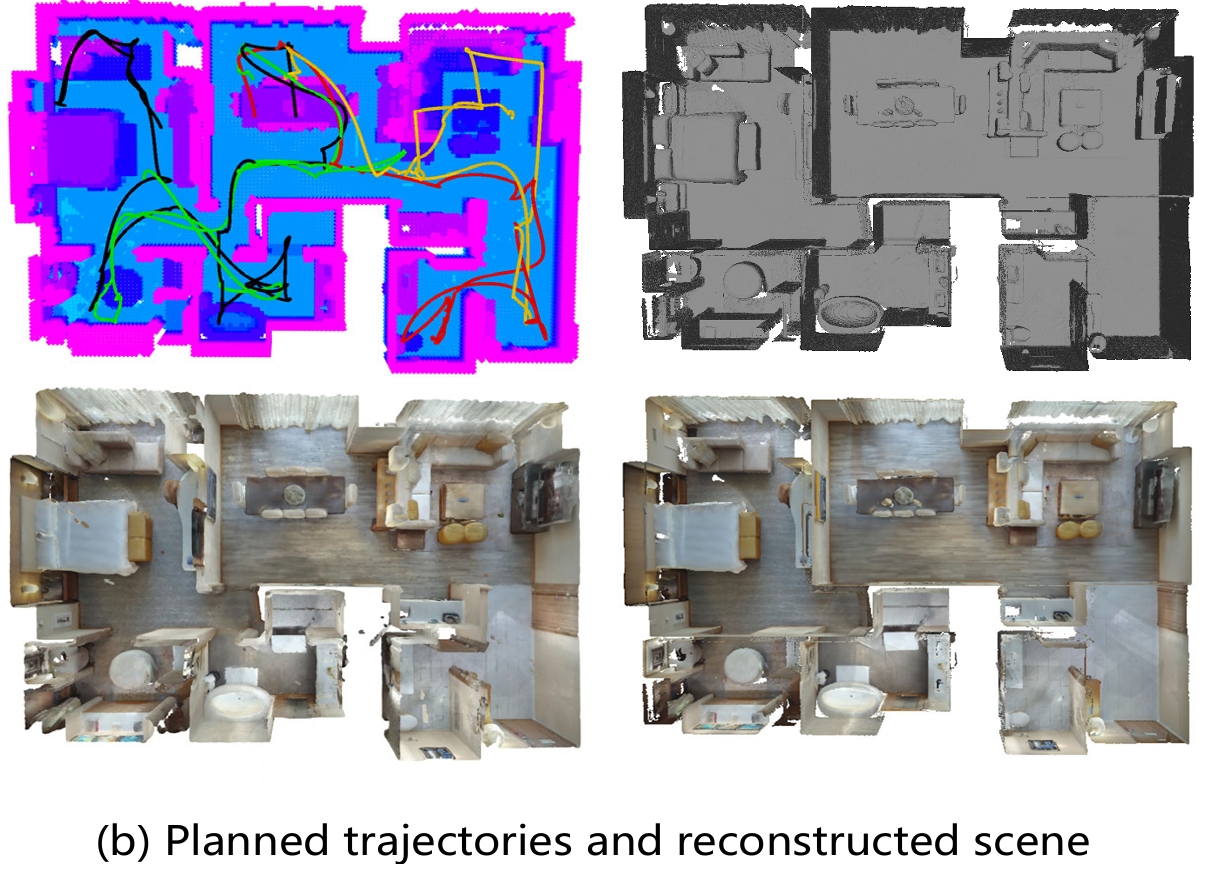
My research interests include active SLAM, autonomous exploration, informative path planning, and robot learning. My current research projects mainly focus on learning-based robot exploration in hazardous and complex environments. Welcome to reach out via email: garryhsu0901@gmail.com(Permanent)/xuyang94@zju.edu.cn (Academic).
News
| Oct 3, 2025 | Invited to chair the session of Computer Vision for Transportation 2 (WeDT24), welcome to reach out at IROS 2025 Hangzhou! |
|---|---|
| Oct 2, 2025 | One paper accepted by T-Mech as regular paper! |
| Sep 18, 2025 | Appointed as Young Editorial Board Member of IET Cyber-Systems and Robotics (IET-CSR)! |
| Sep 4, 2025 | One paper accepted by IEEE IOT-J 2025, congrats to Jing Zeng ! |
| Aug 1, 2025 | Appointed as a member of the Young Editorial Board of BiRob (IF 5.4, Q1)! |
| Jun 30, 2025 | Appointed as the Associate Editor of SII 2026~ |
| Jun 16, 2025 | 2 paper accepted by IROS 2025, congrats to Wenhao and Bo Pang ! |
| May 12, 2025 | One paper accepted by MST 2025, congrats to Shaochen ! |
| Mar 25, 2025 | One paper accepted by RAL 2025, congrats to Jing Zeng ! |
| Mar 11, 2025 | Appointed as the Associate Editor (regular paper) of IEEE RO-MAN 2025~ |
| Mar 4, 2025 | One paper accepted by RAL 2025, congrats to Jin Li ! |
| Jan 28, 2025 | Two papers accepted by ICRA 2025, congrats to Shaohao and Chenglong ! |
| Sep 10, 2024 | Appointed as the Associate Editor of ICRA 2025~ |
| Jun 22, 2024 | We organize an invited session in IEEE ICUS 2024, welcome new submissions~ |
| Jun 15, 2024 | Appointed as the Associate Editor of IEEE RO-MAN 2024~ |
Academic services
Journal Editors: Biomimetic Intelligence and Robotics (BiRob), Young Editorial Board; IET Cyber-Systems and Robotics (IET-CSR), Young Editorial Board.
Conference Editors: ICRA, Associate Editor (2025, 2026); RO-MAN, Associate Editor (2024, 2025); SII 2026, Associate Editor.
Conference Services: ICRA 2024, Session Co-Chair; ICUS 2024/2025, PC Member/Invited Session Chair; IROS 2025, Session Chair
Journal Reviewer: IEEE T-NNLS/RA-L/T-ASE/T-II/T-CDS/T-ITS/T-IV/T-IM/Robotics and Autonomous Systems (RAS), IEEE/CAA Journal of Automatica Sinica (JAS), IEEE Sensor Journal, Information Fusion, Measurement Science and Technology, et al.
Conference Reviewer: CVPR, ICRA, IROS, AIM, ICONIP, et al.
Awards and honors
- National Postdoctoral Program for Innovative Talents (10 in automation nationwide), 2024
- Chinese National Scholarship for Ph.D. Students (2%), Oct. 2022
- Chinese Scholarship Council for Joint Ph.D. Students, Jul. 2022
- Academic Rising Stars of Ph.D. Students, Zhejiang University, Aug. 2022
Talks and presentations
-
2025-04-02: On-site talk at SRIAS of Tongji University. (Invited by Prof. Bin He)
-
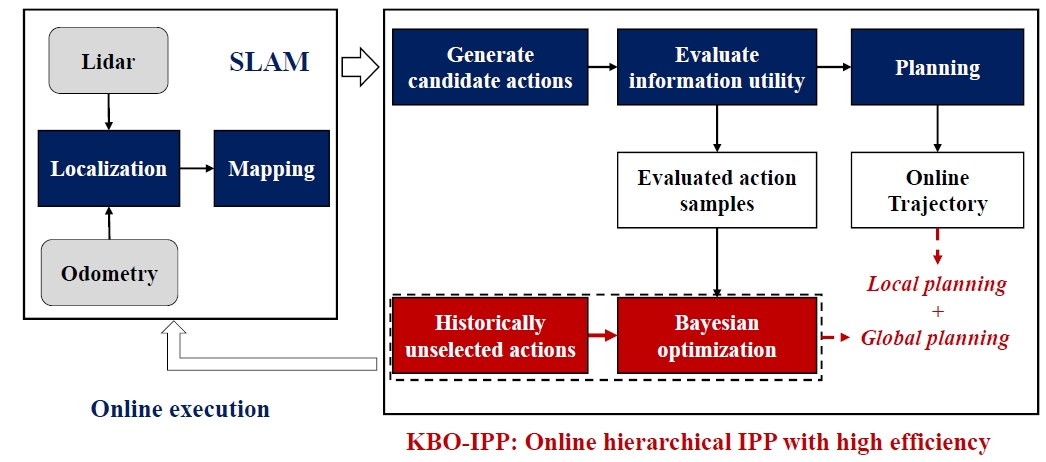
ICRA 2024 (Yokohama, Japan) - CARE: Confidence-rich autonomous robot exploration using Bayesian kernel inference and optimization. Video
-
2024-04-27: Online talk & session chair at PRE-ICRA 2024. (Invited by CAA TC on Hybrid Intelligence)
-
2023-05-18: On-site talk at MiLab of Westlake University. (Invited by Prof. Donglin Wang)~
-
2022-10-15: Online talk at PRE-IROS 2022. (Invited by CAA TC on Hybrid Intelligence)
-
IROS 2022 (Kyoto, Japan) - Confidence-rich localization and mapping based on particle filter for robotic exploration. Video
-
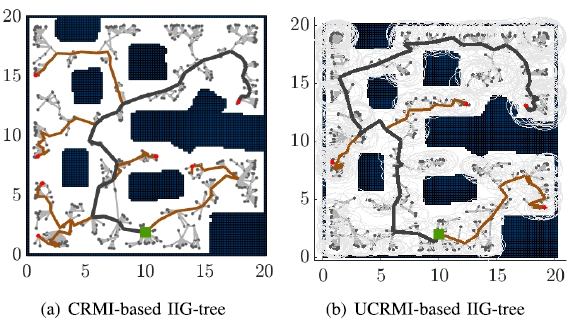
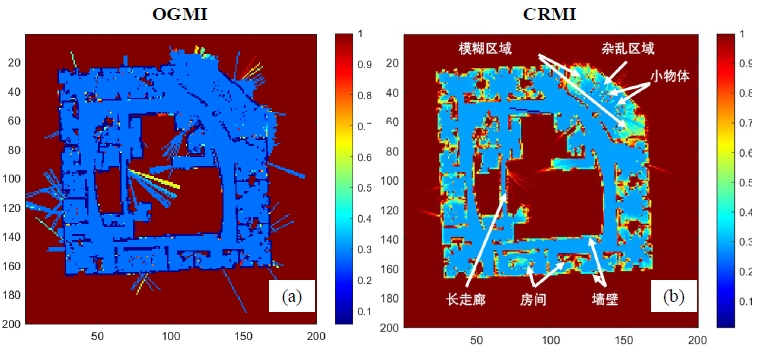
IROS 2021 (Prague, Czech) - CRMI: Confidence-rich mutual information for information-theoretic mapping, Video here: Youtube, Bilibili
Selected publications
Find out my full publication list via Google Scholar.
* co-first author with equal contribution; # Corresponding author.
-
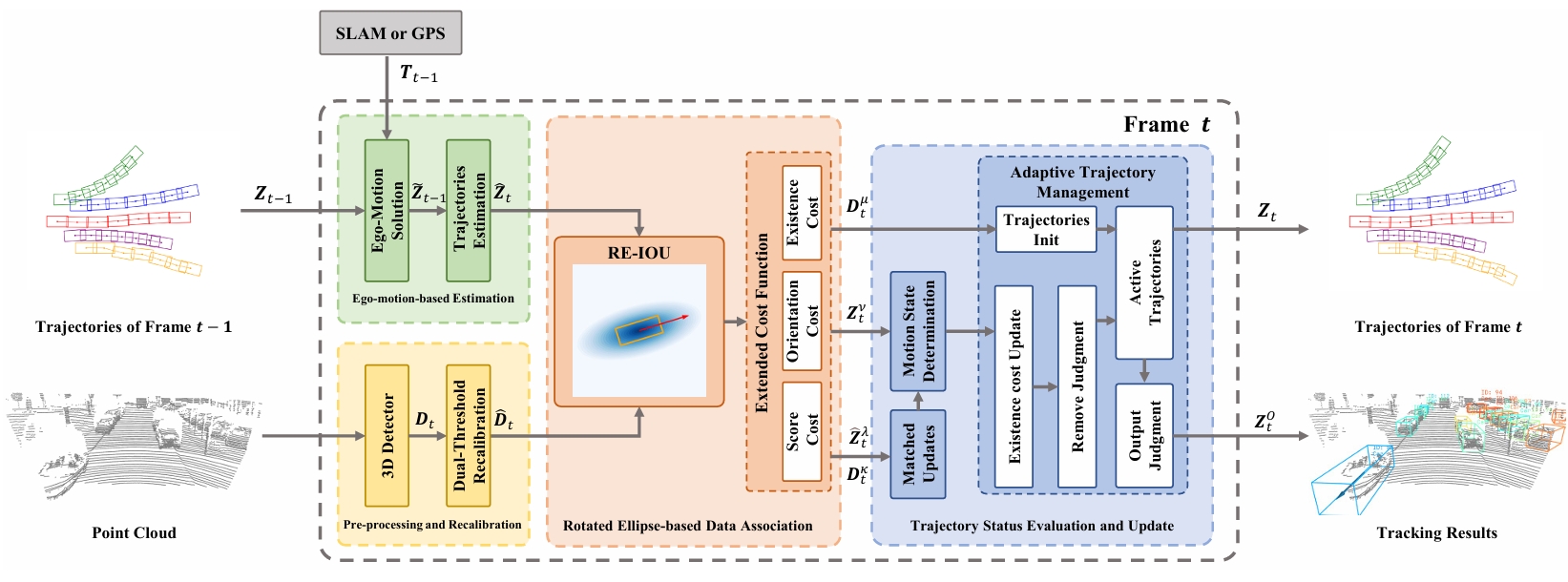 PB-MOT: Pose-aware Association Boosted Online 3D Multi-Object Tracking
PB-MOT: Pose-aware Association Boosted Online 3D Multi-Object Tracking
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 [Abs]